SFM with BAL Files
![]()
5.2. SFM with BAL Files¶
This is an SFM Example that reads from a BAL (Bundle Adjustment in the Large) file.
%pip -q install gtbook # also installs latest gtsam pre-release
Note: you may need to restart the kernel to use updated packages.
import argparse
import logging
import sys
import gtsam
from gtsam import (GeneralSFMFactorCal3Bundler,
PriorFactorPinholeCameraCal3Bundler, PriorFactorPoint3)
from gtsam.symbol_shorthand import C, P # type: ignore
from gtsam.utils import plot # type: ignore
from matplotlib import pyplot as plt
%matplotlib inline
logging.basicConfig(stream=sys.stdout, level=logging.INFO)
Run LM optimization with BAL input data and report resulting error:
# Load the SfM data from file
input_file = gtsam.findExampleDataFile("dubrovnik-3-7-pre")
scene_data = gtsam.readBal(input_file)
logging.info("read %d tracks on %d cameras\n", scene_data.numberTracks(),
scene_data.numberCameras())
INFO:root:read 7 tracks on 3 cameras
# Create a factor graph
graph = gtsam.NonlinearFactorGraph()
# We share *one* noiseModel between all projection factors
noise = gtsam.noiseModel.Isotropic.Sigma(2, 1.0) # one pixel in u and v
# Add measurements to the factor graph
for j in range(scene_data.numberTracks()):
track = scene_data.track(j) # SfmTrack
# retrieve the SfmMeasurement objects
for m_idx in range(track.numberMeasurements()):
# i represents the camera index, and uv is the 2d measurement
i, uv = track.measurement(m_idx)
# note use of shorthand symbols C and P
graph.add(GeneralSFMFactorCal3Bundler(uv, noise, C(i), P(j)))
# Add a prior on pose x1. This indirectly specifies where the origin is.
graph.push_back(
PriorFactorPinholeCameraCal3Bundler(
C(0), scene_data.camera(0),
gtsam.noiseModel.Isotropic.Sigma(9, 0.1)))
# Also add a prior on the position of the first landmark to fix the scale
graph.push_back(
PriorFactorPoint3(P(0),
scene_data.track(0).point3(),
gtsam.noiseModel.Isotropic.Sigma(3, 0.1)))
# Create initial estimate
initial = gtsam.Values()
i = 0
# add each PinholeCameraCal3Bundler
for cam_idx in range(scene_data.numberCameras()):
camera = scene_data.camera(cam_idx)
initial.insert(C(i), camera)
i += 1
# add each SfmTrack
for j in range(scene_data.numberTracks()):
track = scene_data.track(j)
initial.insert(P(j), track.point3())
# Optimize the graph and print results
try:
params = gtsam.LevenbergMarquardtParams()
params.setVerbosityLM("ERROR")
lm = gtsam.LevenbergMarquardtOptimizer(graph, initial, params)
result = lm.optimize()
# Error drops from ~2764.22 to ~0.046
logging.info("initial error: %f", graph.error(initial))
logging.info("final error: %f", graph.error(result))
except RuntimeError:
logging.exception("LM Optimization failed")
INFO:root:initial error: 2764.219293
INFO:root:final error: 0.046138
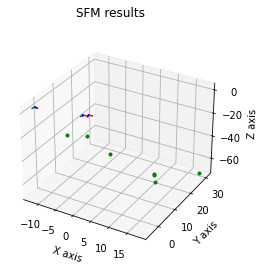
Plot the SFM results.
plot_vals = gtsam.Values()
for cam_idx in range(scene_data.numberCameras()):
plot_vals.insert(C(cam_idx),
result.atPinholeCameraCal3Bundler(C(cam_idx)).pose())
for j in range(scene_data.numberTracks()):
plot_vals.insert(P(j), result.atPoint3(P(j)))
plot.plot_3d_points(0, plot_vals, linespec="g.")
plot.plot_trajectory(0, plot_vals, title="SFM results")
plt.show()