Loopy Belief Propagation
Contents
![]()
3.2. Loopy Belief Propagation¶
Recently, loopy belief propagation or LBP has become trendy again because it might a good fit for highly parallel, distributed processing in chips like GraphCore.
In this example we re-create the planar SLAM example, and show how LBP can be viewed as repeated elimination in the factor graph, and how it can be seen as the “dual” of Gibbs sampling, which adopts dual elimination strategy.
Important note Apr 30 2022: this still contains a bug in LBP
%pip -q install gtbook # also installs latest gtsam pre-release
Note: you may need to restart the kernel to use updated packages.
import math
from math import pi, sqrt
import matplotlib.pyplot as plt
import numpy as np
from collections import defaultdict
import plotly.express as px
try:
import google.colab
except:
import plotly.io as pio
pio.renderers.default = "png"
import gtsam
import gtsam.utils.plot as gtsam_plot
from gtbook.display import show
from gtbook.gaussian import sample_bayes_net, sample_conditional
from gtbook.driving import planar_example, marginals_figure
from gtsam import Point2, Pose2, Rot2, noiseModel
3.2.1. Setting up a non-linear SLAM Example¶
Below we re-create a similar factor graph as in PlanarSLAMExample:
graph, truth, keys = planar_example()
x1, x2, x3, l1, l2 = keys
show(graph, truth, binary_edges=True)

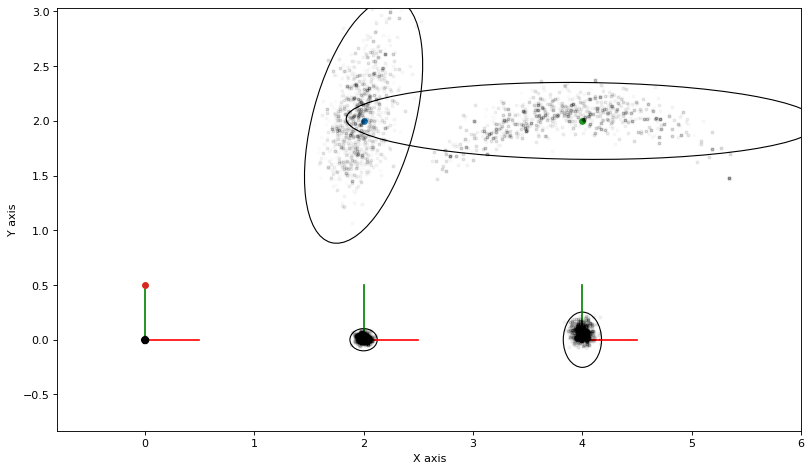
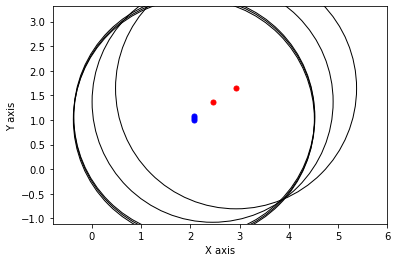
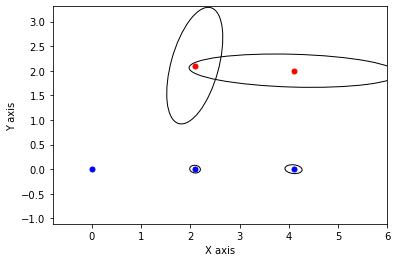
As always, we can calculate and plot covariance ellipses which show the Laplace approximation graphically.
marginals = gtsam.Marginals(graph, truth)
marginals_figure(truth, marginals, keys)
3.2.2. Loopy Belief Propagation¶
We initialize a set of individual Gaussian factors \(q(x_j)\) or beliefs, one for each variable. LBP is a fixed point algorithm to minimize the KL \(D_\text{KL}(p||q)\) divergence between the true posterior \(p(X|Z)\) and the variational approximation
We repeatedly:
pick a variable \(x_j\) at random;
consider the Markov blanket of \(x_j\), the factor graph fragment \(\phi(x_j, X_j)\) where \(X_j\) is the separator;
augment the factor graph fragment with beliefs on all \(x_k\in X_j\), except \(q(x_j)\);
eliminate the separator \(X_j\) by factorizing \(\phi(x_j, X_j) = p(X_j|x_j)q'(x_j)\);
assign \(q(x_j) \leftarrow q'(x_j)\) to be the new belief on \(x_j\).
We first cache all Markov blankets:
markov_blankets = defaultdict(gtsam.NonlinearFactorGraph)
for i in range(graph.size()):
factor = graph.at(i)
for j in factor.keys():
markov_blankets[j].add(factor)
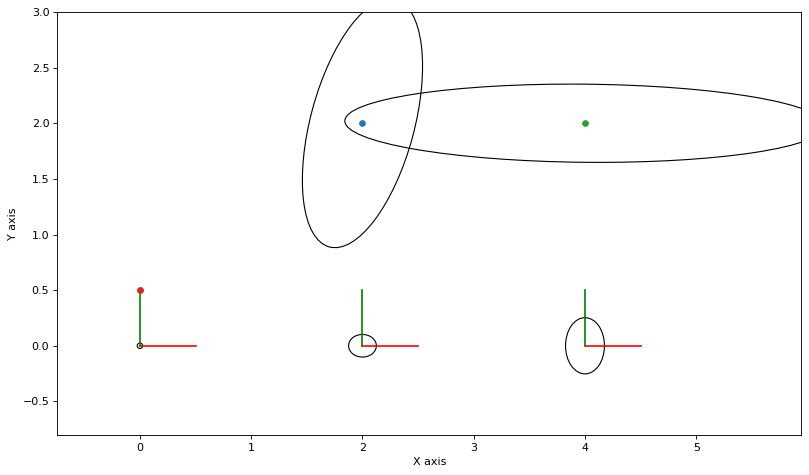
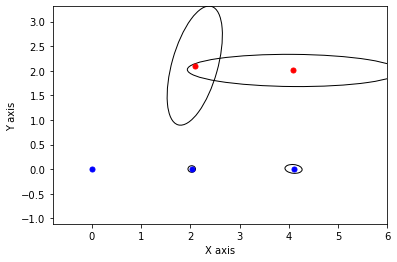
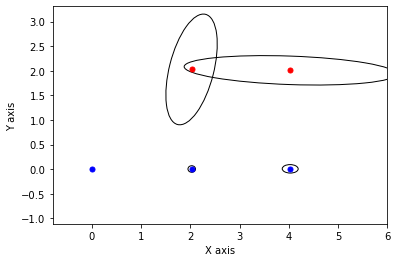
Here are the Markov blankets for \(l_2\) (simple) and \(x_2\) (complex):
show(markov_blankets[l2], truth, binary_edges=True)

show(markov_blankets[x2], truth, binary_edges=True)

We initialize the beliefs \(q_j(x_j)\) on the manifold, which we do in information form by using a HessianFactor, whose constructor reads as follows:
/** Construct a unary factor. G is the quadratic term (Hessian matrix), g
* the linear term (a vector), and f the constant term. The quadratic
* error is:
* 0.5*(f - 2*x'*g + x'*G*x)
*/
HessianFactor(Key j, const Matrix& G, const Vector& g, double f);
We will initialize with an identity Hessian/information matrix \(G\). The entire LPB code is then:
def lbp(x0:gtsam.Values, hook=None, N=100):
"""Perform loopy belief propagation with initial estimate x."""
x = gtsam.Values(x0)
error = graph.error(x)
q = {key: gtsam.HessianFactor(key, G=np.eye(n), g=5*np.zeros(
(n, 1)), f=0) for key, n in zip(keys, [3, 3, 3, 2, 2])}
hook(0, None, x, q, error)
def update(j:int, x:gtsam.Values):
# Get linearized Gaussian Markov blanket and augment with beliefs
augmented_graph = markov_blankets[j].linearize(x)
augmented_keys = augmented_graph.keys()
for k in keys:
if k != j and augmented_keys.count(k):
augmented_graph.add(q[k])
try:
# Eliminate with x_j eliminated last:
ordering = gtsam.Ordering.ColamdConstrainedLastGaussianFactorGraph(
augmented_graph, [j])
gbn = augmented_graph.eliminateSequential(ordering)
q_prime = gbn.at(gbn.size()-1)
# move on the manifold
delta = q_prime.solve(gtsam.VectorValues())
new_x = x.retract(delta)
n = len(delta.at(j))
P = np.linalg.inv(q_prime.information())
q[j] = gtsam.HessianFactor(j, np.zeros((n,)), P)
return new_x
except:
return None
for it in range(1, N):
# choose a variable whose belief to update
j = keys[rng.choice(5)]
new_x = update(j, x)
if new_x is not None:
error = graph.error(new_x)
hook(it, j, x, q, error)
x = new_x
if error < 1e-1:
break
return x, q
We then initialize with either the ground truth or some random values:
rng = np.random.default_rng(42)
if False:
initial = gtsam.Values(truth)
else:
initial = gtsam.Values()
initial.insert(x1, Pose2(2, 1, 0).retract(0.1*rng.random((3,))))
initial.insert(x2, Pose2(2, 1, 0).retract(0.1*rng.random((3,))))
initial.insert(x3, Pose2(2, 1, 0).retract(0.1*rng.random((3,))))
initial.insert(l1, Point2(2, 1)+rng.random((2,)))
initial.insert(l2, Point2(2, 1)+rng.random((2,)))
def print_hook(it, j, x, q, error):
if it==0:
print(f"{it=}, initial error is {error}")
else:
print(f"{it=}, updated {gtsam.DefaultKeyFormatter(j)}, error now {error}")
rng = np.random.default_rng(42)
x, q = lbp(initial, print_hook)
# plot final state
for j in keys[:3]:
P = np.linalg.inv(q[j].information())
gtsam_plot.plot_point2(0, x.atPose2(j).translation(), 'b', P)
for j in keys[3:]:
P = np.linalg.inv(q[j].information())
gtsam_plot.plot_point2(0, x.atPoint2(j), 'r', P)
it=0, initial error is 28739.727972505574
it=1, updated x1, error now 2172.712772099904
it=2, updated l1, error now 2148.902547221964
it=3, updated l1, error now 2242.902395962602
it=4, updated x3, error now 2461.230108399813
it=5, updated x3, error now 2387.7091084849326
it=6, updated l2, error now 2368.772922670549
it=7, updated x1, error now 2364.567407665353
it=8, updated l1, error now 2253.1975732854817
it=9, updated x2, error now 258.17413594697746
it=10, updated x1, error now 258.17050074643566
it=11, updated x3, error now 44.55486007956745
it=12, updated l2, error now 24.990611403796176
it=13, updated l1, error now 24.247842549054184
it=14, updated l1, error now 23.61965973615301
it=15, updated l1, error now 23.60582950705155
it=16, updated l1, error now 23.60581888562852
it=17, updated x3, error now 1.930391429741609
it=18, updated x1, error now 1.8494706291947318
it=19, updated l2, error now 1.7972337283877178
it=20, updated x3, error now 1.743955248832167
it=21, updated x3, error now 1.7439548879885594
it=22, updated x2, error now 1.1223563412735278
it=23, updated x1, error now 1.1216740592068095
it=24, updated l2, error now 1.120626302878474
it=25, updated l1, error now 1.0720527992356346
it=26, updated l1, error now 1.071973731169869
it=27, updated x3, error now 0.14727361719587428
it=28, updated l2, error now 0.14445713509295846
it=29, updated x3, error now 0.14420027781534475
it=30, updated x3, error now 0.14420026949773446
it=31, updated x3, error now 0.14420026949782472
it=32, updated x2, error now 0.09116583627252996
def plot_ellipse(j, x, q):
P = np.linalg.inv(q[j].information())
if j in {x1, x2, x3}:
gtsam_plot.plot_point2(0, x.atPose2(j).translation(), 'b', P)
else:
gtsam_plot.plot_point2(0, x.atPoint2(j), 'r', P)
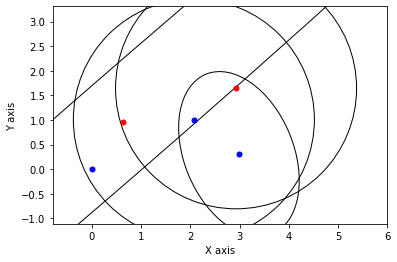
def ellipse_hook(it, j, x, q, error):
if it==0:
for k in keys: plot_ellipse(k, x, q)
else:
plot_ellipse(j, x, q)
rng = np.random.default_rng(42)
marginals_figure(truth, marginals, keys)
x = gtsam.Values(initial)
x, q = lbp(x, ellipse_hook)
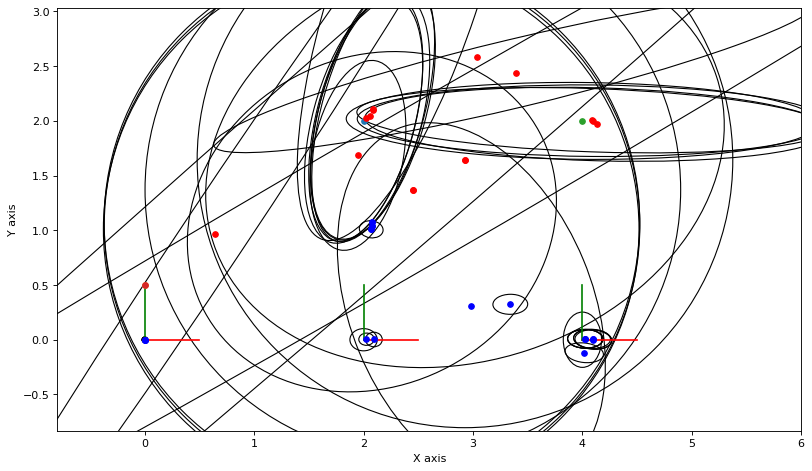
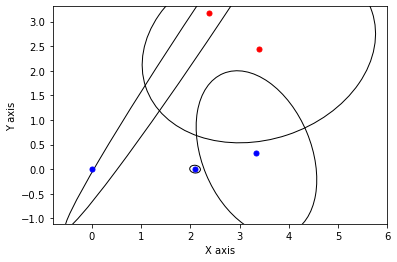
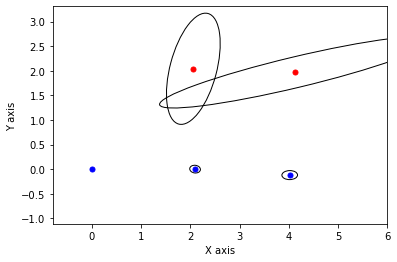
def show_frame(it, j, x, q, error):
if it % 5 != 0: return
for k in keys:
P = np.linalg.inv(q[k].information())
if k in [x1,x2,x3]:
gtsam_plot.plot_point2(0, x.atPose2(k).translation(), 'b', P)
else:
gtsam_plot.plot_point2(0, x.atPoint2(k), 'r', P)
plt.axis('equal')
plt.xlim([-0.8, 6])
plt.ylim([-0.8, 3])
plt.show()
rng = np.random.default_rng(42)
x, q = lbp(gtsam.Values(initial), show_frame)
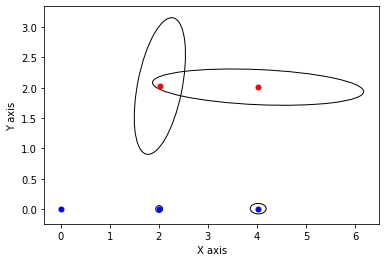
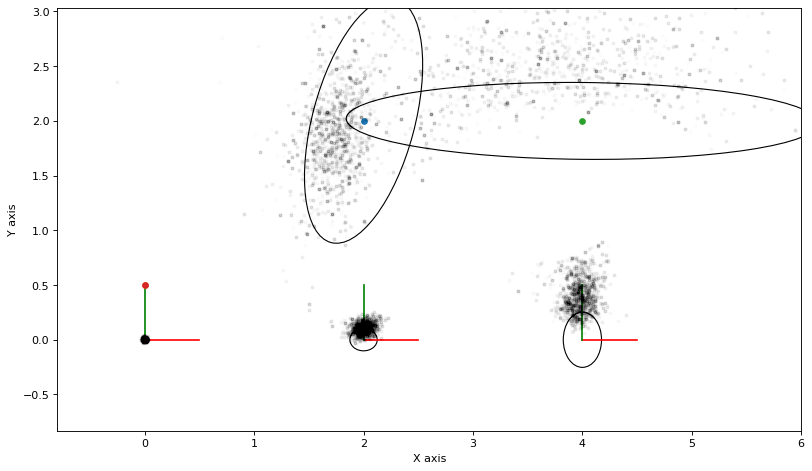
3.2.3. Gibbs Sampling¶
Gibbs sampling is a variant of Markov Chain Monte Carlo sampling that always accepts any proposal.
We repeatedly:
pick a variable \(x_j\) at random;
consider the Markov blanket of \(x_j\), the factor graph fragment \(\phi(x_j, X_j)\) where \(X_j\) is the separator;
eliminate the variable \(x_j\) by factorizing \(\phi(x_j, X_j) = p(x_j|X_j)\phi(X_j)\);
sample \(x_j\) \(\phi(x_j, X_j)\).
We will need:
rng = np.random.default_rng(42)
def plot_sample(manifold_sample, alpha=0.1):
points = np.empty((2, 5))
for i in [1, 2, 3]:
points[:, i -
1] = manifold_sample.atPose2(gtsam.symbol('x', i)).translation()
for j in [1, 2]:
points[:, j+2] = manifold_sample.atPoint2(gtsam.symbol('l', j))
plt.plot(points[0], points[1], 'k.', markersize=5, alpha=alpha)
return points
def proposal(x, j):
"""Propose via Gibbs sampling"""
# Get linearized Gaussian Markov blanket
local_graph = markov_blankets[j].linearize(x)
# Eliminate just x_j:
ordering = gtsam.Ordering()
ordering.push_back(j)
try: # eliminate, might fail if singular
gbn, _ = local_graph.eliminatePartialSequential(ordering)
# sample x_j and propose a new manifold sample
conditional = gbn.at(0)
vvj = gtsam.VectorValues()
vvj.insert(j, sample_conditional(conditional, 1))
return x.retract(vvj)
except:
return x
# Start with MAP estimate
y = gtsam.Values(truth)
N = 10000
marginals_figure(truth, marginals, keys)
for it in range(N):
# choose a variable to perturb
j = keys[rng.choice(5)]
y = proposal(y, j)
if it > N//2:
plot_sample(y, alpha=0.01)
3.2.4. Corrected Gibbs Sampling¶
Above we pretended elimination yielded the correct conditional on \(x_j\) given its separator. Unfortunately, calculating the conditional probability \(P(x_j|X_j)\) exactly is again a hard problem, and sampling from it can be expensive as well. We correct this by rejection a fraction of the proposals, Metropolis style:
Then we run Metropolis sampler where the proposal randomly picks a variable to perturb, and then uses the local factor graph to calculate the acceptance ratio.
rng = np.random.default_rng(42)
def accept(log_a):
"""calculate acceptance, with some care to avoid overflow."""
if log_a >= 0:
return True
if log_a < -10:
return False
return rng.uniform() < math.exp(log_a)
# Start with MAP estimate
z = gtsam.Values(truth)
N = 15000
marginals_figure(truth, marginals, keys)
nr_accepted = 0
for it in range(N):
# choose a variable to perturb
j = keys[rng.choice(5)]
p = proposal(z, j)
# calculate local acceptance ratio
log_a = markov_blankets[j].error(z) - markov_blankets[j].error(p)
if accept(log_a):
nr_accepted += 1
z = p
if it>N//2:
plot_sample(z, alpha=0.01)
print(f"nr_accepted={nr_accepted}")
nr_accepted=8426