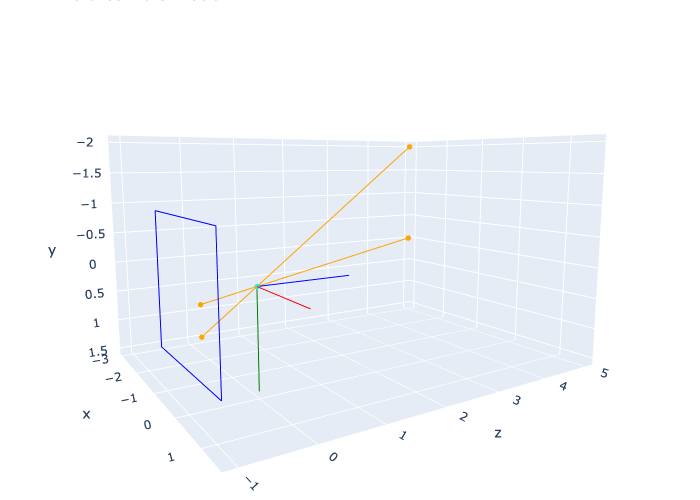
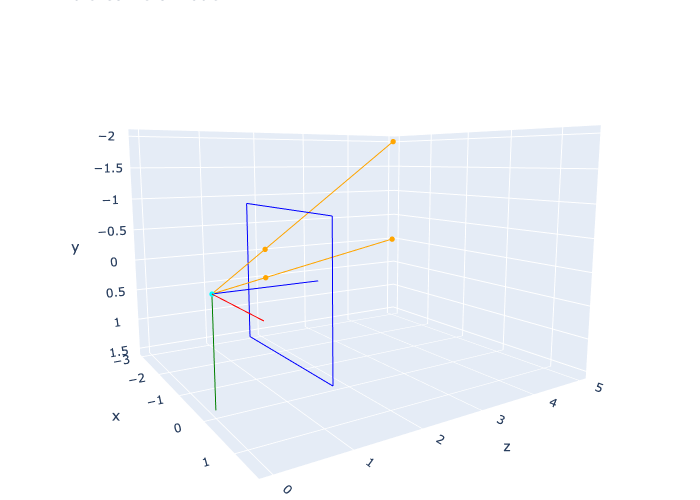
feet = gtsam.Point3(-3,0,5) # point at the feet of the person, 5 meters in front of camera, 3 meters to the lefthead = gtsam.Point3(-3,-2,5) # point at the top of the head (note, Y = *minus* 2 meters)F =1# metershow_3d(go.Figure(data = plane(-F) + [ray(feet, -F), ray(head, -F)] + axes()))